
Infra - Linux
Programação multithread em ambiente Unix: como criar e sincronizar 2 tarefas paralelas
Este artigo discute alguns conceitos de S.O. multithreads, a API POSIX para criação e sincronização de threads e finalmente traz um programa rodando em 3 plataformas diferentes (Linux, FreeBSD e OpenSolaris).
por Adenilson Cavalcanti da SilvaEste artigo discute alguns conceitos de S.O. multithreads, a API POSIX para criação e sincronização de threads e finalmente traz um programa rodando em 3 plataformas diferentes (Linux, FreeBSD e OpenSolaris).
Para facilitar a compreensão dos conceitos, apresentamos alguns exemplos que possuem ordem crescente de complexidade. Seguem anexos os códigos fonte destes exemplos para estudo e experimentação do leitor. Esperamos que você ao final do artigo seja capaz de criar programas multithreads em linguagem C portáveis entre plataformas POSIX. Siga em frente, coloque a mão na massa/código, pois programação somente se aprende praticando.
O nível de dificuldade do material exposto é intermediário (aqueles que já cursaram as disciplinas de computação: Sistemas operacionais e Programação em Linguagem C terão maior facilidade em compreender a exposição). Ainda assim, fizemos um esforço grande para explicar os conceitos apresentados, provendo explicações e definições quando possível.
Se você não conhece ainda a diferença entre processo x thread, sugerimos uma leitura prévia do artigo de programação Multithread em Windows de nossa autoria. Boa leitura!
1. Introdução
Sistemas operacionais multitarefa se caracterizam por serem capazes de rodar múltiplos processos ou programas em paralelo (podendo ou não serem de usuários diferentes) e sua origem remonta aos anos 70. Ao final dos anos 80, este conceito foi extendido para dentro do processo, permitindo a existência de múltiplos caminhos de execução dentro de um mesmo programa. Os primeiros sistemas operacionais a implementar esta característica eram baseados em microkernel (Tanenbaum & Woodhull, 1997), embora em caráter experimental. Até 1991, nenhum sistema operacional comercial possuia uma API em user level para criação e uso de múltiplos threads (Lewis & Berg, 1996), e em somente 4 anos (ou seja, a partir de 1996) os principais S.O. comerciais passaram a suportar múltiplos threads dentro de um processo.
Para permitir a execução de um novo processo/thread, o S.O. deve ser capaz de guardar o estado do thread/processo que estava em execução. O suporte a threads exige que estruturas adicionais sejam adicionadas a estrutura que contêm o processo (contador do programa, registradores, estado da pilha, etc) (Tanenbaum & Woodhull, 1997). A maneira como é realizada esta implementação é dependente do S.O., podendo haver maior ou menor compartilhamento de recursos.
O uso de programação multithread permite a implementação de programação concorrente e em sistemas com múltiplos processadores (e/ou cores) paralelismo real (Love, 2005). O conceito de thread pode ser implementado em user level e kernel level. Operacões em user level são mais baratas, porém se um thread está em uma operação bloqueante (e.x. fazendo I/O), todos os threads do processo param. Por outro lado, chamadas ao kernel são caras, porém se o kernel tem conhecimento dos threads, na situação anterior pode passar o foco de execução para o outro thread do mesmo processo (Tanenbaum & Woodhull, 1997). A JVM (Java Virtual Machine) pode prover threads in user level quando o S.O. não possui esta funcionalidade.
Existem domínios de problema que podem se beneficiar do uso de programação multithread (e.x. processamento de imagens, I/O assíncrono, bancos de dados, etc) e outros onde são discutíveis as vantagens desta técnica (e.x. cálculos seriais).
A principal vantagem do uso de múltiplos threads em relação ao fork de um processo advém da facilidade de comunicação e compartilhamento de dados entres os threads, dado que ambos existem no mesmo espaco de endereco de um único processo e compartilham variáveis globais (Stevens & Rago, 2005). A comunicação entre processos por uso de sinais é limitada e mecanismos de IPC (Inter Process Comunication) apesar de variados (pipes, Shared Memory, etc) impõem uma complexidade por vezes desnecessária na programação. Além disso, em alguns S.O. pode ser mais eficiente criar um novo thread do que um novo processo, além de em algumas implementacões ser mais barato a mudanca de contexto de execução de um thread para outro, se comparado a mudanca de contexto entre processos (Matthew & Stones, 2004).
Entretanto, o uso de threads também impõem algumas dificuldades tais como a necessidade de funcões reentrantes e o fato de que um thread pode quebrar toda a aplicacação por co-existirem em espaco de endereco comum de um único processo. Condicões de corrida podem aparecer, gerando código que funciona na maioria das vezes, porém falha miseravelmente em certas condicões. A debugação de um programa com múltiplos caminhos de execução é uma ordem de magnitude mais complexa se comparada a um programa convencional e finalmente, não havendo múltiplos processadores/cores pode haver até uma diminuição no tempo de execução do programa ao usar mais threads. O próprio venerável Alan Cox fez certa vez a citação "Programação multithread é a melhor maneira de se dar tiro em ambos os pés de uma só vez!" (Matthew & Stones, 2004).
Programação multitthread é um recurso valioso, quando nas mãos de um bom programador e utilizada em um contexto apropriado.
2. POSIX
O padrão POSIX (Portable Operating System Interface) foi criado pela IEEE ((Institute of Electrical and Electronics Engineers) tendo sua primeira versão publicada oficialmente em 1990 e sofrendo subsequentes adicões e revisões em 1993 (extensões tempo real), 1996 (programação multithread),1999 (mais interfaces de tempo real), 2000 (event tracing) e finalmente em 2001 (adicionando entre outros, o padrão ISO C 99) (Stevens & Rago, 2005). A especificação que nos interessa é a IEEE POSIX 1003.1.c. O padrão POSIX surgiu em grande parte por exigência do governo norte-americano por um padrão tornando possível portabilidade entre as várias versões de sistemas derivados do Unix existentes no final dos anos 80. Este foi um período onde as interfaces entre os *nix tornaram-se incompatíveis em função da estratégia comercial de diferenciar o produto em comparação aos concorrentes (Raymond, 2003), sendo um perído conhecido como "Unix Wars" (As guerras do Unix). Raymond faz um relato realmente interessante sobre os eventos que aconteceram no período de 1984 a 1994 no mundo Unix, ficando como sugestão de leitura para os mais curiosos. Posix Threads, ou simplesmente pthreads, é uma API com funcões básicas para criação e controle de threads. Trata-se de uma library que deve ser linkada com os programas que desejem utilizar esta funcionalidade. A libpthread pode ser implementada rodando em user level, fazendo somente chamadas de sistema ou então com hooks para rotinas específicas do kernel (rodando a maior parte do tempo em kernel level) (Lewis & Berg, 1996). Existem várias plataformas que suportam o padrão POSIX:
observação: o Mac OSX usa como kernel o Mach 3.0, com uma camada POSIX (e outros servicos) derivada do FreeBSD mapeando pthreads & processos para threads & tarefas Mach, respectivamente (Apple, 2006).
A função utilizada para criar um thread (header pthread.h) segue abaixo:
int pthread_create(pthread_t *thread, //a) pthread_attr_t *attr, //b) void *(*start_routine)(void *), //c) void *arg); //d)Onde:
a) Ponteiro para uma variável do tipo pthread_t, que será preenchida com um identificador do thread;
b) Ponteiro para uma estrutura do tipo pthread_attr_t, permite mudar o comportamento do thread (modo atachado ou não, tamanho do stack, nível de prioridade de execução, etc) e por ser um parâmetro opcional, geralmente se passa NULL;
c) Ponteiro para a função que irá ser executada dentro do thread. O protótipo da função deve ser semelhante a: void *a_name(void* parameter); Pelo fato do tipo de retorno da função ser um ponteiro para void, pode-se retornar qualquer tipo de dado para o thread principal da aplicação quando o(s) thread(s) extras forem "coletados";
d) Ponteiro para um argumento a ser passado para a função, ao ser do tipo void * pode-se passar qualquer tipo de dados no parâmetro da função (e.x. estruturas, vetores, etc). Obviamente, a função thread depois precisará fazer o casting para o tipo adequado; Atente que em caso de sucesso, a função retorna 0 (zero), valor convencionado para sucesso para as funcões no Unix. Entretanto, em caso de erro, um número qualquer pode se retornado, não necessariamente -1 como nas outras funcões no Unix.
Geralmente, após criar um thread extra em um programa, é necessário "coletar" este thread, juntando o thread principal da aplicação e o thread extra de execução (a menos, é claro, que o thread extra tenha sido criado com o atributo PTHREAD_CREATE_DETACHED). A função para juntar o(s) thread(s) extras com a aplicação segue abaixo:
int pthread_join(pthread_t th, //a) void **thread_return); //b)a) Thread ID, valor recebido quando o thread foi criado;
b) Ponteiro para ponteiro para um ponteiro do tipo void (pode ser utilizado para receber qualquer tipo de dado retornado pela função que rodou no thread extra);
A função que roda no thread extra pode retornar informação para o thread principal da aplicação utilizando a função void pthread_exit(void *retval). Finalmente, os programas devem ser linkados com a biblioteca libpthread para utilizarem as funcões descritas.
Vamos examinar o código de exemplo abaixo:
0: int main(int argc, char* argv[])
1: {
2: int res;
3: pthread_t thread;
4: struct data obj;
5: void *message;
6:
7: obj.field = 10;
8: obj.number = 1.3333;
9:
10: res = pthread_create(&thread, NULL, simple, &obj);
11: if (res)
12: return -1;
13:
14: pthread_join(thread, &message);
15: printf("Received data is: %s\n", (char*)message);
16:
17: return 0;
18: }
Cria-se um thread novo na linha 10, passando para a função simple um ponteiro para uma estrutura data. Caso tenha ocorrido um erro (ou seja, valor de retorno da função diferente de zero), o programa retorna imediatamente.
A partir deste momento, o thread extra vai executar processamento, enquanto que o thread principal da aplicação vai aguardar o retorno do thread extra devido a chamada da função pthread_join (linha 14). Quando o thread extra retornar, um valor de retorno será apontado para a variável message e imprimi-se uma mensagem retornada pela função. O restante do código era trivial e foi omitido, podendo o programa completo ser encontrado no arquivo minimal.c.
Na existência de um recurso compartilhado entre dois ou mais threads, onde este recurso seja modificado pelos mesmos, exige-se a utilização de mecanismos de sincronização entre os threads. A API POSIX fornece para este fim os semáforos e os mutexes, cujo princípio de funcionamento é semelhante: existe uma sessão crítica de código onde somente 1 único thread poderá estar executando em um dado instante. Isto garante a atomicidade de uma operação, assegurando o comportamento esperado no programa.
Para isso, o POSIX fornece o uso de semáforos e mutex (Mutual Exclusion). Ambos garantem a execução de um único thread em um certo trecho de código, com uma diferenca semântica: mutex são indicados para travar (lock) acesso a um recurso comum sendo geralmente utilizados para sincronizar dois threads, enquanto semáforos podem atuam como "porteiros" controlando o acesso de n threads a um recurso. De fato, é possível implementar um mecanismo em função do outro, porém existem problemas onde a semântica dos semáforos se adapta melhor se comparada a mutex.
Os semáforos discutidos abaixo fazem parte do padrão POSIX de extensões para tempo real, servindo unicamente para threads. O outro tipo de semáforos (conhecidos como Semáforos System V) servem para sincronizar processos diferentes e não serão discutidos neste artigo.
Existem muitas semelhancas na implementação e uso de ambas as técnicas de sincronização, seguindo de forma geral os passos:
- definição de uma variável de controle (pthread_mutex ou sem_t);
- acesso a variável de controle para barrar acesso de outros threads na sessão crítica (pthread_mutex_lock ou sem_post);
- liberar outros threads (pthread_unlock);
22: sem_t bin_sem;
23:
24: int main(int argc, char *argv[])
25: {
26: pthread_t t1, t2;
27: char argt1[] = "thread1";
28: char argt2[] = "thread2";
29: int rc;
30:
31: rc = sem_init(&bin_sem, 0, 0);
32:
33: rc = pthread_create(&t1, NULL, first, (void *)&argt1);
34: rc = pthread_create(&t2, NULL, second, (void *)&argt2);
35:
36: rc = pthread_join(t1, NULL);
37: rc = pthread_join(t2, NULL);
38:
39: sem_destroy(&bin_sem);
40:
41: return 0; 42:
43: }
Na linha 22 definimos a variável de controle do tipo sem_t sendo inicializada na linha 31 com a função sem_init. Ambos os threads devem ter acesso a ela e embora tenha sido definida como global, também pode ser passada como argumento na função do thread (i.e. first e second). Esta variável precisa ser posteriormente destruída utilizando a função sem_destroy, como pode ser visto na linha 39.
Como dito anteriomente, um semáforo pode controlar o acesso de múltiplos threads, sendo o seu comportamento definido na inicialização. O protótipo da função é:
int sem_init(sem_t *sem, //a) int pshared, //b) unsigned int value); //c)Onde:
a) Ponteiro para a variável semáforo;
b) Comportamento do semáforo (zero significa que o semáforo é local para este processo);
c) Valor com que ele é inicializado;
A operação de incrementar/decrementar o valor do semáforo deve ser atômica (ou seja, apesar dela poder exigir múltiplas operacões em ASM, deve aparecer para o sistema operacional como uma operação única. Para tanto, se utilizam as funcões abaixo:
int sem_wait(sem_t * sem); //incrementa atomicamente o semáforo
int sem_post(sem_t * sem); //decrementa atomicamente o semáforo
Onde:
sem é um ponteiro para a variável semáforo.
O código de uso das funcões do programa semaphore_simple.c aparece abaixo, nas funcões que rodam dentro de cada thread extra na aplicação:
45: void *first(void *arg)
46: {
47: int i;
48: pthread_t myId;
49: myId = pthread_self();
50:
51: printf("I"m the firsthread, my ID is: %d \n", myId);
52: sleep(5);
53:
54: for(i= 0;i
A função first roda na primeira thread extra do programa e na linha 56 incrementa o valor do semáforo com a função sem_post. Enquanto este valor for zero, a função second ficará parada na chamada à função sem_wait (linha 72), ou seja, o segundo thread extra somente continua a execução após o semáforo puder ser decrementado.
3. Estudo de caso
O programa final deste artigo (arquivo mutex_final.c) apresenta o uso de mutex para controlar o acesso a um recurso global. Basicamente, teremos 2 threads rodando com funcões inversas: o primeiro thread acessa uma variável e incrementa ela, imprimindo o valor obtido e logo a seguir a decrementa para retornar ao estado original. Ou seja, se a variável valia 100, deve ser incrementada para 101 (sendo este o valor impresso) e logo a seguir restaurada para o valor original. O segundo thread faz o contrário: descrementa para 99, imprime o valor e retorna a variável para o valor original.
O programa permite execução em dois modos: sincronizado onde o acesso à variável global é controlado por um mutex, garantindo o resultado esperado. E não sincronizado, onde cada thread acessa o recurso global sem controle, permitindo o primeiro thread ser interrompido pelo segundo thread no meio da operação. A figura 1 mostra o esquema de execução sincronizada do programa.
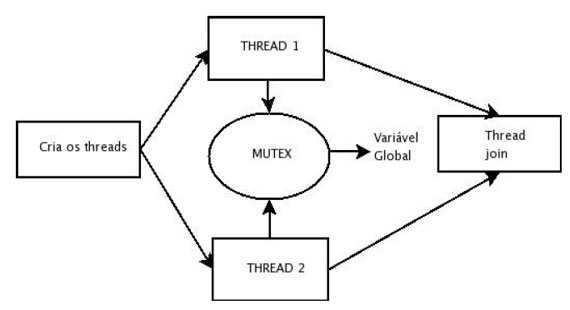
Figura 1: Diagrama lógico do programa sync_mutex.
O modo de execução do programa é controlado ao se definir a variável de ambiente RUN_MODE para SYNC (default) e UNSYNC, como na figura 2. Pelo fato do codigo ser relativamente extenso (mutex_final.c), optou-se por somente comentar alguns aspectos interessantes no mesmo:
- Na linha 26, definiu-se a macro __REENTRANT. Esta fornece uma dica para o compilador utilizar versões thread safe de funcões normais
- Na linha 42, a variável mutex é inicializada com pthread_mutex_t mutex1 = PTHREAD_MUTEX_INITIALIZER;
- A variável mutex precisa ser inicializada, sendo isso feito na linha 42 com
42: static pthread_mutex_t mutex1 = PTHREAD_MUTEX_INITIALIZER;
Esta macro deve utilizada somente se a variável mutex for estática (no caso deste programa, decidimos torná-la global para as funcões, embora isto não seja obrigatório). A macro acima seria o equivalente a chamar a função
int pthread_mutex_init(pthread_mutex_t *mutex, const pthread_mutexattr_t *mutexattr);
com parâmetro NULL para atributo de mutex.
- As funcões de mutex lock/unlock tem os protótipos:
int pthread_mutex_lock(pthread_mutex_t *mutex)); int pthread_mutex_unlock(pthread_mutex_t *mutex);
Onde passa-se um ponteiro para a variável mutex, devendo-se lembrar de destravar o mutex após passar pelo trecho crítico de código. Tentar travar duas vezes o mesmo mutex tem comportamento indefinido, variando com a implementação do sistema utilizado.
Finalmente, para destruir um mutex, deve-se utilizar a função
int pthread_mutex_destroy(pthread_mutex_t *mutex);
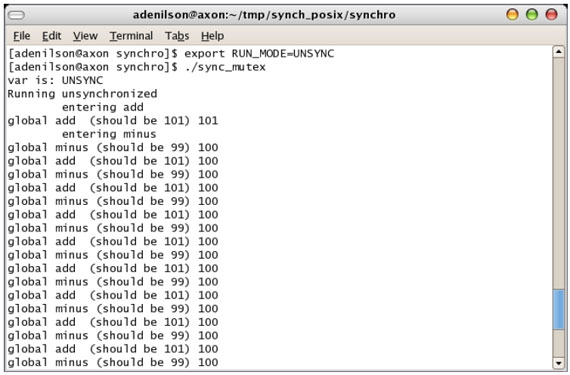
Figura 2: O programa rodando em modo não sincronizado.
Vamos análisar os trechos interessantes do programa, no arquivo mutex_final.c. A diferenca no modo de execução (SYNC e UNSYNC) consiste nas funcões selecionadas para rodar nos threads da aplicação. Quando em modo UNSYNC, as funcões add e minus acessam a variável global sem a utilização de um mutex para permitir uma adição/subtração atômica, como nas linhas 128 e 132 abaixo:
121: void *add(void *msg)
122: {
123: printf("\tentering add\n");
124: fflush(NULL);
125: int i;
126:
127: for (i= 0; i
Em oposição, as funcões s_add e s_minus utilizam o sistema de mutex para garantir acesso único a variável global:
159: void *s_add(void *msg)
160: {
161: printf("\tentering s_add\n");
162: fflush(NULL);
163: int i;
164:
165: for (i= 0; i
Após fazer o lock no mutex na linha 166, incrementa-se a variável e logo a seguir imprimese o seu valor. Após decrementar o valor da variável (buscando restaurar seu valor inicial), destravamos o lock (linha 172) no mutex e simulamos uma operação matemática qualquer na chamada a função square.
Aqui, desejou-se deixar explícita a necessidade de permitir o acesso de outros threads ao recurso compartilhado o mais rapidamente possível: supondo ter sido feito um lock antes do loop (linha 165) e fosse removido o lock somente no final do mesmo (linha 179), teríamos somente um thread rodando na aplicação enquanto o segundo thread precisaria esperar uma eternidade pelo acesso à variável global. O resultado seria um programa multithread com o comportamento de um programa monothread.
Além disso, desejava-se mostrar como outras tarefas podem rodar fora do trecho crítico de código.
4. Ambientes
O padrão POSIX especifica uma interface, não ditando a maneira como é realizada a implementação de uma certa função (Steven & Rago, 2005). Desta maneira, um programa pode usar a mesma função (e.x.: pthread_create) sem se preocupar como que o S.O. a implementa.
Entretanto, é vantajoso conhecer como que diferentes S.O. implementam o suporte a múltiplos threads, podendo com o tipo de plataforma mudar a estratégia para paralelizar operacões. Assim, pode ser mais ou menos eficiente em alguns casos criar um thread ou um novo processo (e.x. o Windows NT é lendário por ter péssima performance para criar novos processos, sendo mais efetivo na criação de novos threads).
Visando atestar a portabilidade alcancada com o uso dos pthreads, o programa de exemplo foi testando em 3 plataformas distintas: Linux (kernel 2.6.15), FreeBSD 6.1, OpenSolaris 5.11. No caso do Linux, a distribuição testada foi o Ubuntu 6.06. Para FreeBSD, realizou-se o teste em uma distribuição chamada PCBSD, que oferece uma interface gráfica de instalação realmente amigável e um sistema de pacotes para instalação de software chamado PBI (interessados, visitem o site http://www.pcbsd.org). O OpenSolaris foi testado utilizando uma distribuição livecd chamada Belenix (http://www.belenix.org), cuja detecção automática de hardware foi realmente exemplar. A máquina de testes utilizada foi um notebook HP Pavilion zv5430 (processador Athlon 64 3200, 512 MB ram, vídeo GeForce 4).
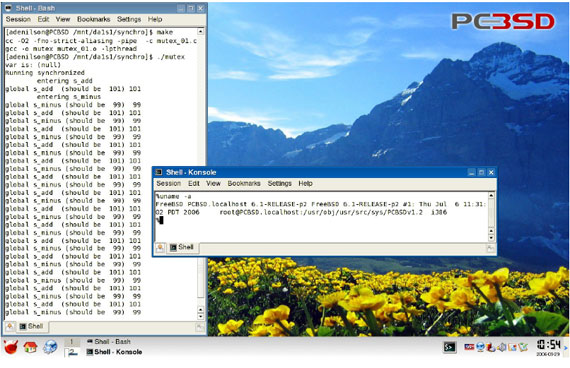
Figura 3: FreeBSD 6.1 (PCBSD).
Das distribuicões citadas, a única que revelou-se difícil para instalar foi o FreeBSD, que por conta de um bug na ACPI do notebook mapeava uma das teclas de multimedia para o botão de poweroff, desligando a máquina logo no inicio do processo de boot (dica: para ignorar a tecla, passe a seguinte opção de boot set hint.atkbd.0.flags=0x8 e depois de instalado, acrescente a mesma no arquivo /boot/device.hints). Também é interessante citar que tanto o BSD como o Solaris exigem uma partição primária para realizar a instalação, ao contrário do Linux que pode ser instalado em uma partição extendida/lógica. Gerenciadores de boot também podem ter problemas para bootar uma partição com o filesystem utilizado pelo BSD (UFS2) e Solaris, sendo útil neste momento uma atualização na versão do gerenciador de boot ou no caso do GRUB o uso da opção rootnoverify.
Finalmente, é possível facilmente montar uma partição UFS no linux, tomando o cuidado de observar que tanto o BSD como o Solaris trabalham com o conceito de disk slices (fatias de disco) dentro de uma partição simples (estes slices *não* aparecem no linux ao chamar fdisk -l). Por exemplo, ao instalar o BSD na partição segunda particao primária do HD (hda2 no linux), foram criados 2 slices para a raiz do sistema (hda10) e área de troca (hda11). Uma chamada a dmesg uma vez bootado no Linux permite reunir as informacões necessárias para montar as particoes BSD/Solaris.
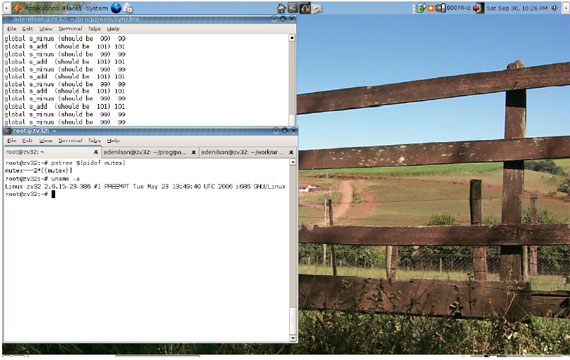
Figura 4: Linux 2.6 (Ubuntu 6.06)
Abaixo listamos como que as plataformas testadas implementam o mecanismo de threads:
- Modelo threads Linux: implementa threads como processos, ou seja, a mesma estrutura é usada para guardar a lista de processos/threads ativos no sistema (Love, 2005). Os threads e processos são todos criados com a syscall clone() com flags específicas. Esta abordagem diverge substancialmente do modelo de threads do Solaris e Windows, pois os threads são vistos no Linux unicamente como uma maneira facilitada de compartilhar recursos e não como uma unidade mais leve de execução de tarefas. Com o desenvolvimento da NPTL (Native Posix Threads Library), uma chamada a ps -aux lista somente os processos.
- Modelo threads BSD: implementa o que se chama de "variable weight threads" ou threads de peso variável (McKusick & Neil, 2004). O nível de compartilhamento de recursos é dependente da syscall que criou o thread (kse_create, fork, etc).
- Modelo threads Solaris: mapeia os threads in user level para LWP (Light Weight Process), que por sua vez são mapeados para kernel threads (Lewis & Berg, 1996). O usuário pode mapear diretamente um thread em user level com um LWP usando pthread_set_concurrency. Chama-se atenção que este mapeamento ocorre em 2 níveis e pode não ser 1 pthread para 1 LWP, ficando a cargo do escalonador fazer este mapeamento para que o thread possa se tornar uma entidade "executável" (Mauro & McDougall, 2000).
Figura 5: OpenSolaris (Belenix)
5. Conclusão
O padrão POSIX é maduro e amplamente suportado por diversos sistemas operacionais, de embarcados RTOS (Real Time Operating System) até mainframes. Continua sendo ativamente revisado, sofrendo adicões visando se adaptar a mudancas na tecnologia nos últimos 18 anos.
Os pthreads permitem portabilidade real e simples entre diferentes sistemas sistemas unix, recompensando programador por garantir o retorno do investimento em uma única e elegante API.
6. Referências citadas
Apple: Kernel Programming guide. 2006
McKusick, M. K.; Neil, G. V. : The Design and Implementation of the FreeBSD Operating System. 2004.
Lewis, B.; Berg, D. J. : Pthreads Primer: A guide to multithreaded Programming. 1996
Love, R. : Linux Kernel Development. Second Edition. 2005.
Matthew, N.; Stones, R. : Beginning Linux Programming. 2004.
Mauro, J.; McDougall, R. : Solaris Internals: Core Kernel Components. 2000.
Raymond, E. S. : The art of Unix Programming. 2003.
Stevens, W. R.; Rago, S. A. : Advanced Programming in the Unix Environment. 2005.
Tanenbaum, A. S.; Woodhull, A. S. : Operating systems: Design and Implementation. Second Edition. 1997
Download do Código

- Login automático com SSH e Automatização da instalação (deploy) e atualização de sites com GitLinux
- O que é Ar.DroneLinux
- Criando aplicativos para o iPhone no Linux (sem Xcode e MacOS X)Linux
- Blu-ray: Reproduzindo, copiando, ripando e assistindo no GNU/LinuxLinux
- Extensão Sun Presentation Minimizer para Broffice.ORGLinux
